


Copyright © 2018 Guangzhou Xilinear Machinery Co., Ltd.. | All Rights Reserved. 粤ICP备10213131号 Powered by: www.300.cn guangzhou.300.cn
Mob/WhatsApp:+86-13600046543
Tel:+86-020-32638488
Fax:020-32638426
Email:sales1@xilinear.cn;10086156@qq.com
Address: 132,Chuangqiang Road,Xintang Town,Zengcheng,Guangzhou City,China



CONTACT



Wechat Number
Function of Pneumatic Claw of Automatic Bottle Blower
Page view
It is widely used in automatic production line, bottle blowing machine, automatic take-out, manipulator and other automatic machinery, instead of manual take-out to achieve clamping function, which is the key part of modern manipulator.
Characteristic of air pressure clamp of automatic bottle blowing machine:
1. All the structures are dual-acting and can achieve two-way grasping. It can be automatically aligned with high repetition accuracy.
2. The grasping moment is constant.
The following pictures:
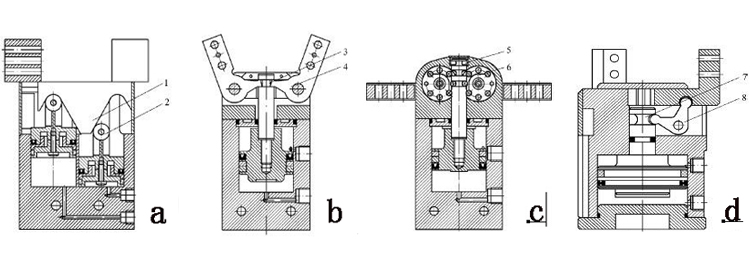
1. Hyperbolic Bing 2, Roller 3, Ring groove 4, Trunnion 5, Ring groove (3) 6 Driving wheels 7 Ring groove 8, Crank
Parallel Claw
As shown in the figure (a), the fingers of parallel claws are operated by two pistons, each of which is connected by a roller and a hyperbolic Bing to the fingers of Qigong to form a special driving unit. In this way, Qigong fingers always move axially to the center, and each finger cannot move independently. If the finger moves backwards, the previously compressed piston is in the exhaust state, while the other piston is in the compressed state.
Parallel grippers are driven by a single piston as shown in Figure (e) animation. The axle center drives the crank. There is a relative crank groove on each claw piece. In order to reduce the friction resistance, the claw piece is connected with the body to form a steel ball sliding rail structure.
II. Y-shaped Claw
As shown in figure (b), the piston rod of Y-shaped claw has a ring groove. Because the finger trunnion is connected with the ring groove, the finger can move simultaneously and be centered, and the grasping moment is always constant.
3. Rotary Claw
As shown in Figure (c), the action of the rotary gripper works according to the meshing principle of the rack. The piston is fixed with a movable shaft up and down. There are three annular grooves at the end of the shaft. These grooves mesh with two driving wheels. Therefore, the pneumatic finger can move at the same time and automatically align. The principle of gear and rack ensures that the grasping force is always constant.
4. Three-point Claw
As shown in Figure (d), the piston of the three-point claw has an annular groove. Each crank is connected with a Qigong finger. The piston motion can drive three cranks to move immediately, thus controlling the opening and closing of three fingers by colleagues.

Previous article:
Aseptic Cold Irrigation Technology